Published On Mar 2, 2024
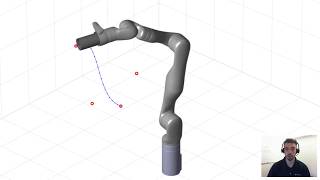
This video explains what Forward Kinematics is and how Forward Kinematics can be solved using the Denavit-Hartenberg (DH) Convention for a very famous Cobot Kuka iiwa14. The Forward Kinematics are solved using the DH Convention and Homogeneous Transformation Matrix is formulated via DH Table using MATLAB. Moreover, Kuka iiwa14 robot is simulated in MATLAB SimScape to visualize the configuration figured by the Forward Kinematics.
To solve the forward kinematics, firstly Frames are assigned to the robot as per DH convention, then a DH Table is formulated from which Homogeneous Transformation Matrix is defined. Then DH Table and HTM is coded through MATLAB and a SimScape Multibody model is loaded and used to visualize the robot in different configurations.
#matlab #robotics #cobot