Published On Feb 6, 2017
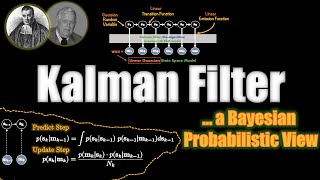
Here, we discuss the Kalman Filter, which is an optimal full-state estimator, given Gaussian white noise disturbances and measurement noise.
These lectures follow Chapters 1 & 3 from:
Machine learning control, by Duriez, Brunton, & Noack
https://www.amazon.com/Machine-Learni...
Chapters available at: http://faculty.washington.edu/sbrunto...
This video was produced at the University of Washington
show more