Published On Sep 11, 2020
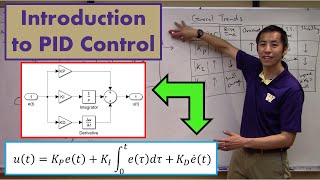
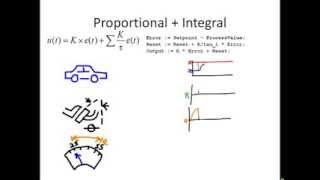
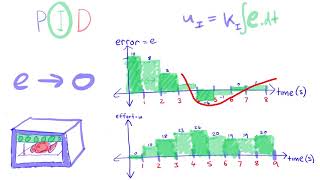
MECE3350 Control Systems, Lecture 13, PID controllers
Steady-state error explained (from lecture 7): • Steady-state error explained
Exercise 66: • L13E66 Control Systems Lecture 13 Exe...
Exercise 67: • L13E67 Control Systems Lecture 13 Exe...
Lecture notes here: https://www.biomechatronics.ca/teachi...
Lecture 14: Implementing PID controllers: • Control Systems Lecture 14: Implement...
Full course here: https://www.biomechatronics.ca/teachi...
Lectures playlist: • Control Systems Exercises
Exercises playlist: • Control Systems Exercises
show more